D C Motor
D C Motor Assignment Help | D C Motor Homework Help
D.C. Motor
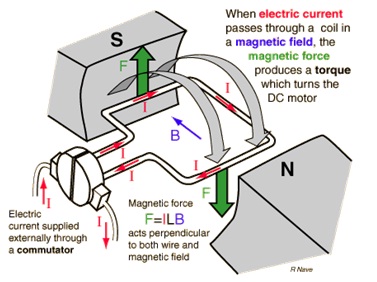
Principle. When a current-carrying-conductor capable of a free movement is placed in a magnetic field, it experiences a mechanical force and begins to move in a direction given by Fleming’s left hand rule.An electric motor is a machine which converts electrical energy into mechanical energy. When it works on direct current, it is called a D.C. motor.
Construction. It consists of a rectangular coil ABCD (called the armature) situated between the poles of a permanent magnet or electromagnet. The ends of the coil are connected to a commutator consisting of two split rings R1 and R2. The armature is capable of rotating about the axis. As the armature rotates the two split rings make contact alternately with the copper brushes B1 and B2. The coil and the brushes are so adjusted that when the plane of the coil becomes perpendicular to the magnetic lines of force, their contact with the segments gets reversed. Current is passed through the armature from a battery.
Working. Let the plane of the coil be parallel to the field and the direction of current through the coil be along ABCD. The coil carrying current experiences a torque as it is in a magnetic field. Because of this, the section CD moves up and AB move down. That is, it begins to rotate in the antilock direction. The torque on a coil of N turns, carrying current I placed in a magnetic field B and enclosing an area A is given by the relation
τ = I N AB sin θ,
where θ is the angle which the normal to the plane of the coil makes with the direction of magnetic field. As the coil rotates, the torque goes on decreasing and becomes zero when the coil becomes perpendicular to the lines of force. But the coil is able to cross this position due to its inertia.
As soon as half a rotation is completed, the segment R1 comes in contact with the brush B2 and segment R2 with the brush B1. So the current through the coil is reversed, that is, along DCBA. Again the coil experiences a torque and CD moves down and AB moves up. Hence the rotation is continued in the same direction.
Back emf. As coil rotates, magnetic flux through it changes and it starts working as a dynmo. An induced emf E is produced. It opposes the applied potential differences V. Hence it is called emf. Current flowing in the coil is reduced and is given by
I = (V – E)/R
R = Resistance of armature circuit.
At low speeds, the back emf E is small so that the armature current I is large. Sometimes, this armature current is sufficiently large to cause damage to the armature windings. This is prevented by inserting a variable resistance, called the starter, in series with the armature. As the speed increases, the starter is reduced.
Efficiency of a Motor.
Input power of motor = VIHeat losses of motor = I2R
Output power = Input – loss = VI – I2R
= I (V – IR)
= I.E
Efficiency of motor} = η = Available mechanical power/Input electrical power = I.E/I.V = E/V
. : η = Back emf/ Applied emf
For maximum output power,
EI = maximum
E [V – E/R] = maximum
EV/R – E2/R = maximum
Differentiating with respect to E, we have
V/R – 2E/R = 0
or V = 2E
or E = V/2
Hence for maximum output power, back emf must be half of applied potential.
For more help in D.C. Motor click the button below to submit your homework assignment